關(guān)注官方微信

動(dòng)態(tài) · 中心
DYNAMIC CENTER
作者:智信禾
時(shí)間:2023-08-14
據(jù)國(guó)家知識(shí)產(chǎn)權(quán)局中國(guó)專利公布公告網(wǎng)站顯示,北京京東方技術(shù)開發(fā)有限公司“控制方法、裝置、訓(xùn)練方法、電子設(shè)備及存儲(chǔ)介質(zhì)”專利于 8 月 11 日申請(qǐng)公布。
該專利背景技術(shù)中介紹,殘疾患者的肢體癱瘓、缺失造成日常生活受到極大影響,且腦機(jī)接口技術(shù)存在信噪比低、測(cè)量分析復(fù)雜度較高,導(dǎo)致通過腦電直接讀取人類思維活動(dòng)、解碼成肢體控制信息的難度較大等問題。
因此,該專利申請(qǐng)?zhí)峁┮环N基于腦電信號(hào)的控制方法,可將肌肉的活動(dòng)表征解碼成假肢運(yùn)動(dòng)的控制信息,提升腦電控制目標(biāo)對(duì)象運(yùn)動(dòng)的精度和效率。
摘要信息如下:
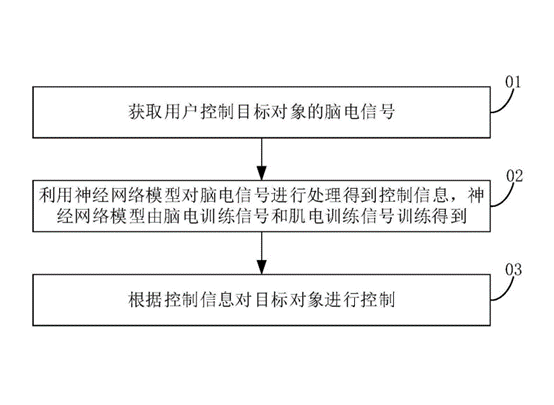
本申請(qǐng)公開了一種基于腦電信號(hào)的控制方法、訓(xùn)練方法、控制裝置、電子設(shè)備以及存儲(chǔ)介質(zhì)。控制方法包括:獲取用戶控制目標(biāo)對(duì)象的腦電信號(hào),并利用神經(jīng)網(wǎng)絡(luò)模型對(duì)腦電信號(hào)進(jìn)行處理得到控制信息,其中,神經(jīng)網(wǎng)絡(luò)模型由腦電訓(xùn)練信號(hào)和肌電訓(xùn)練信號(hào)訓(xùn)練得到,以及根據(jù)控制信息對(duì)目標(biāo)對(duì)象進(jìn)行控制。如此,提高了整體腦機(jī)接口的性能,使假肢能靈活自由的完成大腦下達(dá)的指令動(dòng)作,而且還有利于殘肢患者能夠進(jìn)行日常的生活交流合作,恢復(fù)部分的生活自理和工作交流能力。
(文章來源:國(guó)家知識(shí)產(chǎn)權(quán)局中國(guó)專利公布公告網(wǎng)站)